A proximity control example
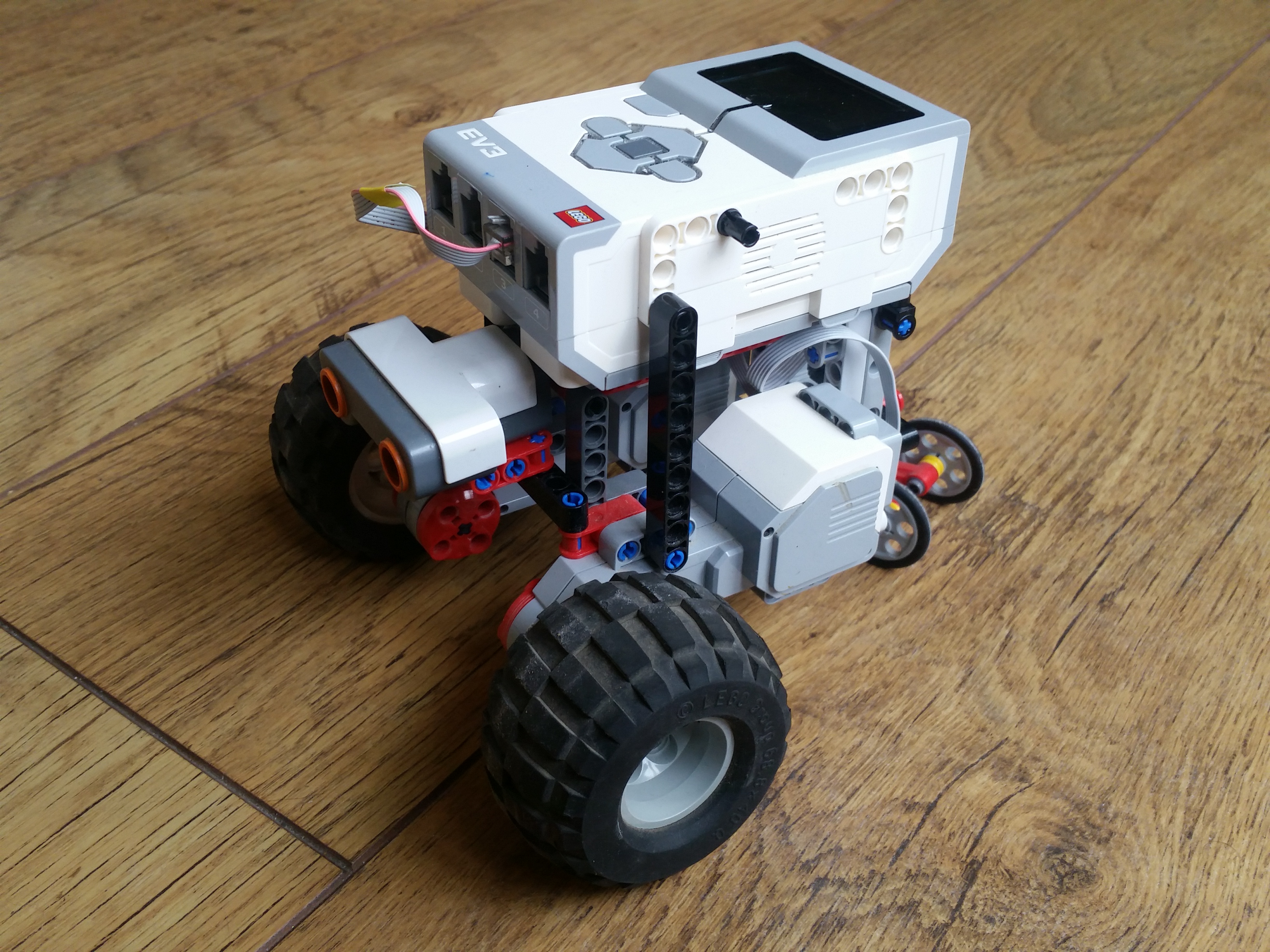
- Build an EV3 robot with two motors (ports B and C) and an ultrasonic sensor (port 3), something like this,
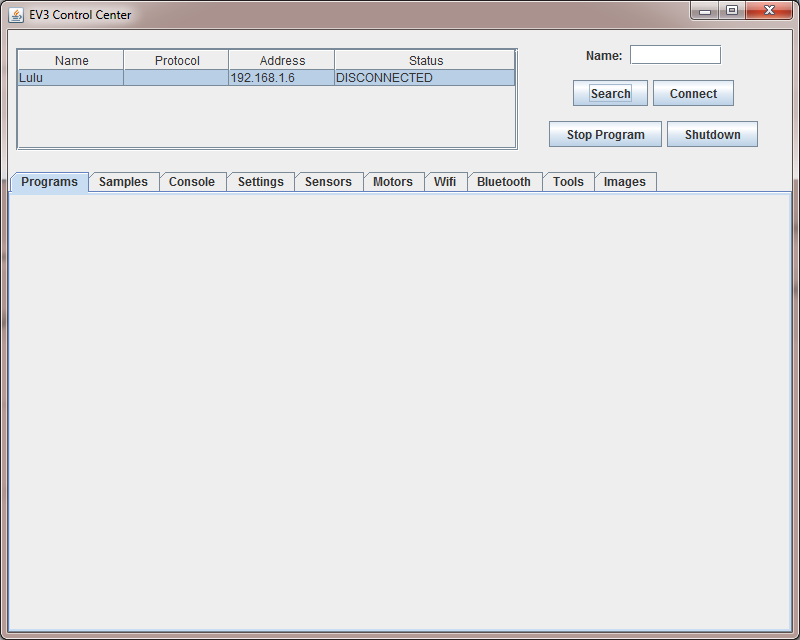
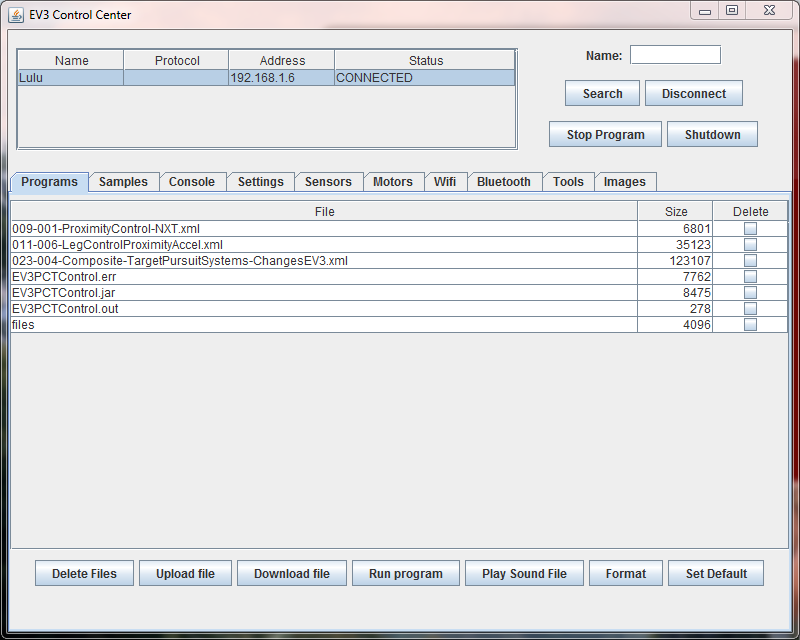
- On your computer start the ev3control application. This can be found in the LeJOS installation folder, e.g. C:\Program Files\leJOS EV3\bin. The following window will appear.

- Click on the Search button. This will list the EV3’s on the network. Click on the appropriate EV3. If no list appears then enter the IP address in the Name box. Click Connect.
- Click Upload file and navigate to the PCT platform installation folder and select the 009-001-ProximityControl-*.xml file (depending on whether you have an EV3 or NXT ultrasonic sensor on your robot).
- On the robot run the EV3PCTControl.jar application (it should be set as the default). When this screen comes up press the enter button (centre button).
- Using the up and down buttons move the cursor (>) to the desired file, and press enter.
- Wait until the configuration has loaded. At this point you can connect from the PCTMonitor GUI, if desired. Press enter to start to configuration. The PCT system configuration will now run.
- To stop the program press the escape button (top left). Repeating escape return to previous screens.
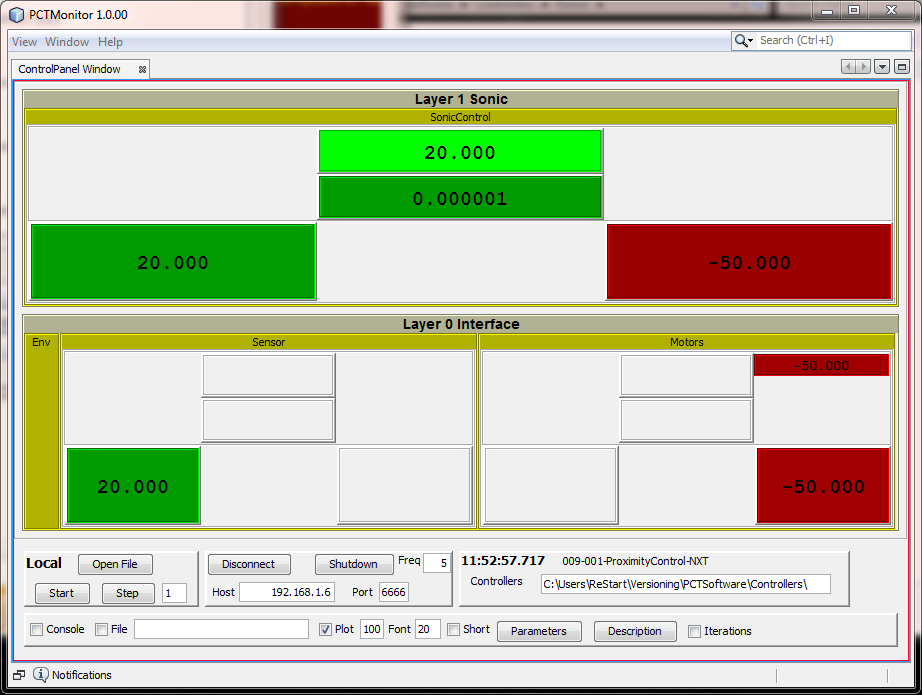
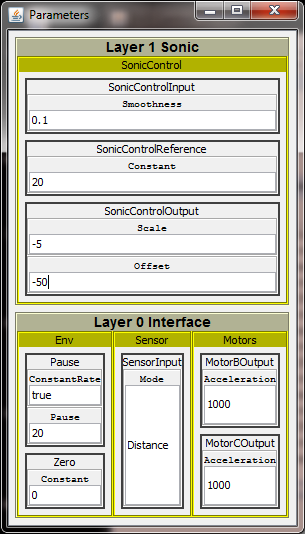
Monitoring
While the robot is running you can connect to remote robot from the PCTMonitor on your computer. Here are some samples of what it would look like.